Continuous Contact Based Skating Technique for Robotic Platform

Since August 2019, I have along with two graduate students been working on the development of a platform for quick locomotion of a robot. This platform takes inspiration from skates used by us as a form of locomotion. This platform is more suitable for movement along plain surfaces as compared to bipedal mechanisms due to its simplicity and requirement of only a small amount of computation power for balance. We aim to develop this platform for use on ice as well!
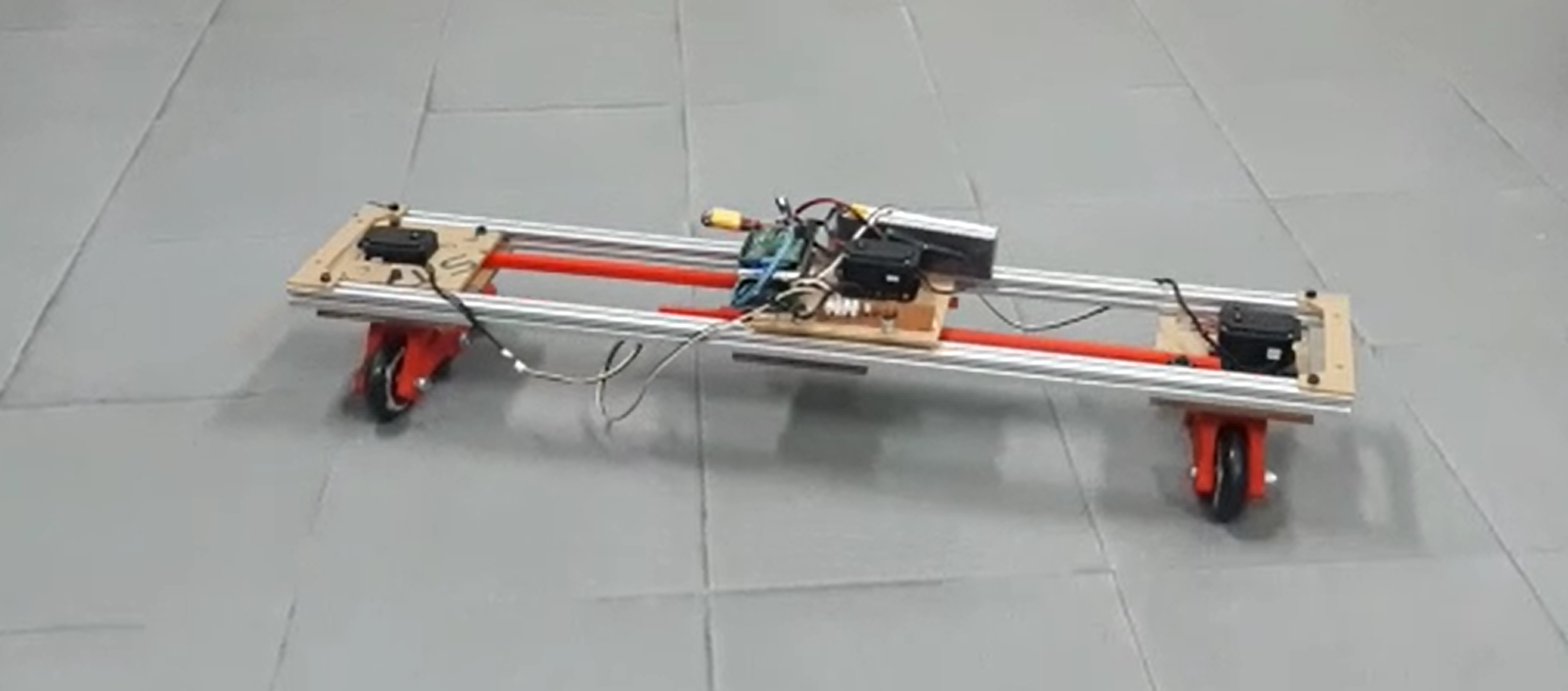
This project is currently under development at the Mechatronics Lab at IIT Delhi. I along with Prof. J P Khatait and Mr Rajesh Kumar (PhD student) are collaborating on this effort. We have already fabricated our working prototype and started designing the control algorithms for this system. We have also written a paper on our findings which we are in the process of publishing to the ASME journal. Do check out the video below


