[Submitted] Decentralized Real-Time Planning for Multi-UAV Cooperative Manipulation via Imitation Learning
Abstract
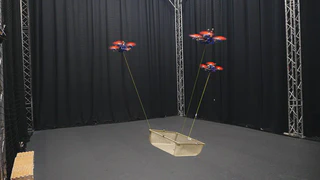
Existing approaches for transporting and manipulating cable-suspended loads using multiple UAVs along reference trajectories typically rely on either centralized control architectures or reliable inter-agent communication. In this work, we propose a novel machine learning–based method for decentralized kinodynamic planning that operates effectively under partial observability and without inter-agent communication. Our method leverages imitation learning to train a decentralized student policy for each UAV by imitating a centralized kinodynamic motion planner with access to privileged global observations. The student policy generates smooth trajectories using physics-informed neural networks that respect the derivative relationships in motion. During training, the student policies utilize the full trajectory generated by the teacher policy, leading to improved sample efficiency. Moreover, each student policy can be trained in under two hours on a standard laptop. We validate our method in both simulation and real-world environments to follow an agile reference trajectory, demonstrating performance comparable to that of centralized approaches.
Type
Publication
In IEEE International Symposium on Multi-Robot & Multi-Agent Systems