Bachelor Thesis: Continous Contact based Skating Robot
The continuous contact-based skating technique is a locomotion platform that promotes stability as the robot does not lose contact with the ground during locomotion. This technique utilizes the sideways movement of the two skates for propelling the base forward while ensuring the skates are continuously in contact with the ground. Uninterrupted movement is possible by cyclically changing the orientation of the two skates simultaneously.
Publications
- Gupta, V., Kumar, R., Agarwal, S., Kar, I. N., and Khatait, J. P. (March 5, 2021). “Design and Development of a Mobile Platform Mimicking Skating With Continuous Contact.” ASME. J. Auton. Veh. Sys. April 2021; 1(2): 021002. https://doi.org/10.1115/1.4050195
- Kumar, R., Gupta, V., Agarwal, S., and Khatait, J. P. (June 4, 2021). “Design of Robotic Motion Platform Utilizing Continuous Contact Skating.” ASME. J. Mechanisms Robotics. December 2021; 13(6): 061009. https://doi.org/10.1115/1.4050827
Experiments
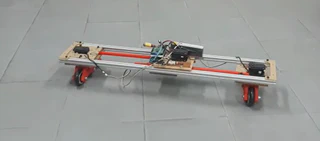
Our proposed design has been validated in the real world and in Simulation. The demonstrations can be seen below:
Approach
In this project, we start with a mathematical model mimicking a continuous skating technique is developed to analyse the kinematic behaviour of the platform. Kinematic and dynamic equations of motion are derived for the nonholonomic constraints. Heuristic based motion primitives are defined to steer the robotic platform. For the lateral movement of the platform, a creeping-based motion primitive is also proposed. A prototype of the robotic platform is developed with three actuated degrees-of-freedom—orientation of two skates and distance between them. A multibody model of the platform is also developed in MATLAB. Analytical expressions are verified using simulation and experiments. The robotic platform follows the desired motion profiles. The motion profiles include straight-line motion, motion in a circular curve, and lateral creep-like motion of the platform. However, the initial deviation has been observed in both the simulations and experiments due to the slipping of the roller skate at the contact point with the surface. The platform can be effectively used in a structured environment.