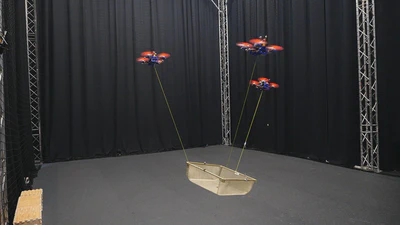
Master Thesis: Decentralized Real-Time Planning for Multi-UAV Cooperative Manipulation via Imitation Learning
Collaborative transportation and manipulation of cable-suspended loads by multiple UAVs offer a promising way for expanding UAVs’ role in heavy-lifting operations. Existing …
•
1 min read
Read more